THE CURRENT STATUS OF GPS NETWORK, DATUM TRANSFORMATION AND REAL TIME KINEMATIC GPS POSITIONING IN KOREAChulsoo YANG and Sangsoo KIM, KoreaKey words: GPS network, datum transformation, geoid height, RTK positioning. AbstractThe current status of GPS network, datum transformation and real time kinematic GPS positioning in Korea is investigated. Datum transformation from Korean geodetic system to WGS-84 shows that apparent differences between the Korean datum and WGS-84 horizontal coordinates for the same point are approximately -11.5 to -10.2 seconds in latitude and 7.2 to 8.3 seconds in longitude. The posterior RMS difference between them is 25cm. The orthometric heights by WGS-84 ellipsoidal height and local geoid model showed 12cm RMS differences from the national datum. In addition, it is remarkable that the test of RTK-GPS positioning for cadastral surveying showed cm-level accuracy whose baseline lengths longer than 15km. INTRODUCTIONPost-processed GPS surveying with high accuracy and reliable result with a standard error of some millimeters has been well known and used quite a lot since many years. The observation time varies from some minutes to hours or days depending on the baseline length and the conditions for the GPS observations. To reach this high accuracy, it is required to use relative carrier phase measurements, and WGS-84 position of the reference station as accurate as possible. One of the objectives of the nationwide GPS network is to provide the reference data for geodetic surveys as a new type of geodetic control point. For many applications, the accuracy requirements are on the centimeter level or lower with an observation time as short as possible, i.e. some seconds to some minutes. Relative carrier measurements in kinematic mode are used for these purposes. The results can be processed by post processing or in real time. Cadastral surveying aims at defining and guaranteeing property boundaries, and determining coordinates of all measured points to give information on the size and nature of land use. GPS surveying can well accommodate the characteristics of cadastre and the objects of cadastral survey. The main object of this research is to clarify and develop the use of kinematic GPS methods in cadastral surveying. Using one reference system makes it easier to create boundaries in cadastral maps and recognize their positions on the ground. Thus, the aim is also to find out the relation between the local datum and the world geodetic system. GPS NETWORK OF KOREAEmploying GPS positioning requires well-established regional and global geodetic networks. In Korea, precise surveying by GPS has started with the establishment of the first continuously operating observation station in 1994. At the end of 2001, more than 80 permanent GPS stations will be established throughtout the country. The distances among the stations range from 30 km in urban areas to 60km in rural and mountainous areas. The station operated by Korea Astronomy Observatory and another one operated by Korea National Geography Institute have been registered with IGS GPS network as DAEJ and SUWN respectively.
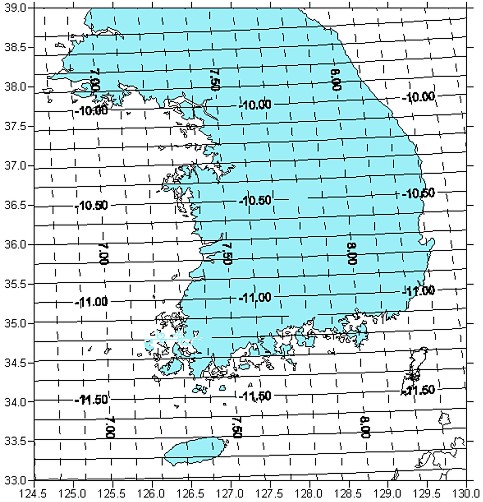
Figure 1. Permanent GPS station operated by Korean government. The stations marked with solid rectangle are operated by the Ministry of Government and Home Affairs, and the stations with circle are operated by the National Geography Institute. Figure 1 shows current status of the continuously operating GPS stations for geodetic and cadastral surveying established by Korean government. The station is equipped with the latest dual-frequency receiver. A receiver, a modem, a power supply and a tiltmeter are installed inside the pillar. The Ministry of Government and Home Affairs (MOGAHA), Ministry of Science and Technology, and National Geography Institute play cooperative roles in establishing and operating GPS networks. The purpose of the network is to (1) provide single- and dual-frequency data for relative measurements, (2) provide differential corrections for broadcasting to real-time users, (3) monitor the integrity of the GPS system, (4) act as high-precision control points for surveying and monitoring crust movements. The collected data at each observation station are transferred to the data center with the high-speed modem through public telephone lines. At the data center, the collected data are processed automatically using precise baseline analysis software to estimate 3 dimensional coordinates. Data processing is done repeatedly depending on ephemerides prepared. Calculations of baselines and positions are carried out using the broadcast ephemerides within 3 hours after the data acquisition. Alternative calculations are done to get final results using precise ephemerides prepared by IGS about 11 days later after the observations. The data will be provided to users in the RINEX (Receiver Independent data Exchange) format via Internet for post-processing. In the near future, it is expected that some of the stations operated by MOGAHA will support RTK-GPS positioning. The network will be the backbone of the newly established precise geodetic network in conjunction with the conventional triangulation network. DATUM TRANSFORMATIONThe Korean Datum employs the Bessel ellipsoid as a reference with its origin fixed at Tokyo, Japan. The datum is different from WGS-84 or ITRF (IERS Terrestrial Reference System) that GPS employs as the reference frame. While the request for the coordinates referenced to the existing datum are still large, demands for the well-accepted global coordinate systems have been also increasing a lot. Recently, a move to employ ITRF with GRS80 as the reference ellipsoid has been underway in Korea surveying community. The tie of GPS surveys to existing triangulation monuments and vertical benchmarks enables the the transformation of GPS datum to be resulted in the national datum. It has advantages in establishing minor control points and finding outlying points in local datum since they can be done with efforts much less than when the conventional method is used. This has led us to establish converting processes from a global datum to local ones. To find the coordinate difference between the datums, 58 triangulation points are used to determine 7 conversion parameters between the Korean datum and WGS-84. The seven parameters are three origin shifts (d X, d Y, d Z), three rotations (w X, w Y, w Z) and a scale factor (d S). They were estimated by least squares methods. In this process, the geoid height referenced to the local ellipsoid has been calculated on the basis of the datum shift of Tokyo Datum with respect to WGS-84 (d X=146.43m, d Y=-507.89m, d Z=-681.46m) reported by Geographical Survey Institute of Japan (Tsuchiya and Tsuji, 1996). The apparent differences between the Korean Datum and WGS-84 horizontal coordinates for the same point are approximately -11.5 to –10.2 seconds in latitude and 7.2 to 8.3 second in longitude (Yang et al., 1998). This corresponds to –360m to –310m in northward and 180m to 210m in eastward shift of Korean datum with respect to WGS-84. The posterior RMS difference between them is 25cm. This accuracy will result in better than 1-PPM accuracy when relative GPS surveying is carried out from the control point with its WGS-84 coordinate obtained by datum transformation. Figure 2 shows computed corrections in latitude (solid line) and longitude (broken line) between WGS-84 and Korean datum, and table 1 shows the estimated seven parameters. Table 1. The estimated seven parameters to transform from Korean Datum to WGS-84.
Figure 2. Contour lines of the correction in latitude and longitude to transform from WGS-84 to Bessel (unit in seconds). The accuracy after transformation depends not only on the transformation formula but also on the internal accuracy of the system. When 7 transformation parameters are estimated for local areas, they are, especially with no constraint in parameters, significantly different from those for the national scale. This is largely due to the combination of outlying points in local datum and distorted local surveying networks. Geographical latitude and longitude of local datum is influenced by vertical deflections different from those at the Tokyo origin. Thus, fixing rotation is not reasonable because vertical deflections are not uniform from one area to another. Adopting the scale factor from the nation-wide estimation is desirable to have a reference ellipsoid of a consistent size nationwide. Numerical tests with the fixed scale factor give out parameters consistent with the nation-wide parameters. Also, these parameters give sufficiently small residuals at local minor control points.
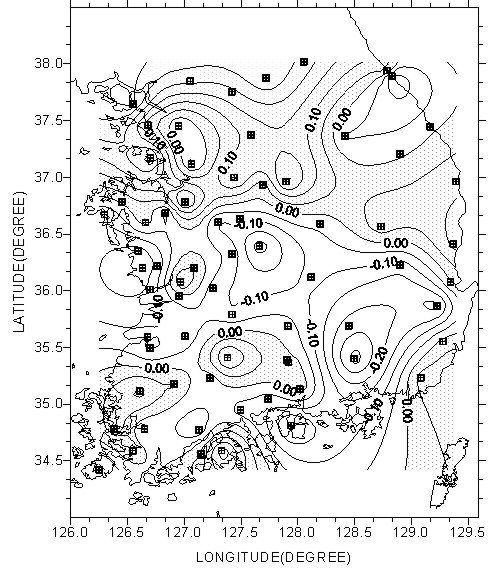
Figure 3. Geoid height differences between GPS/leveling and PNU95. The contour interval is 0.05m and, the leveling points are plotted with the box. VERTICAL DATUMHeights are related to the reference ellipsoid, whereas conventional leveling related heights to the geoid. No mathematical correspondence can be achieved as the geoid is an irregular surface defined by gravity. In usual, correlation must be established for a number of points in the area between GPS heights and orthometric leveling related to geoid. Interpolation is then carried out to deduce the orthometric heights of points measured by GPS. A greater density of vertical control points is required in an area of topographic irregularity where the geoid is likely to be irregular, as well. Ellipsoidal heights are given from GPS measurements, and if they are combined with precise local geoid, orthometric heights are easily calculated. This can significantly reduce the efforts to measure the heights by leveling. The accuracy of the calculated orthometric heights depends on the accuracy of the local geoid, and that of the GPS ellipsoidal heights. Throughout the southern half of the Korean peninsula, a local geoid model is available. The model is calculated with over 5,000 well-distributed and well-controlled gravity measurements, sea surface heights from various altimeters, and a reference Earth gravity model of the OSU91A (Rapp et al., 1991). At 71 well-distributed points, the GPS/geoid heights are compared with orthometric heights from the national vertical datum. The RMS difference is about 12cm. Figure 3 shows the result. In figure 3, the leveling points are plotted with the box, and the geoid height differences between GPS/leveling and PNU95 geoid (Choi et al., 1997) are shown with 5cm interval contour lines. Although the result is not satisfactory, the differences of geoidal heights are useful in determining elevations in a small area where only one benchmark is available. The pseudoelevations for the area will be closer to the true values than if no geoid model were used and a single point were held fixed. The geoid is relatively smooth and elevations within 10km x 10km area can be determined 3cm or better in flat area. PERFORMANCE TEST OF RTK-GPS POSITIONINGFor high productivity in positioning and for high precision navigation, it is necessary to obtain the results from the GPS observations in real time. To perform RTK positioning a communication link is needed for the transmission of data from the reference receiver to the rovers. Real time implies that the computations of the positions generally are performed directly inside the rovers. The relatively large amount of transmitted data requires a transmission rate in the order of 2400-9600 bps. In general, we are only allowed to transmit data with a maximum power of 1.0 W in a specific narrow frequency range without a license. Unfortunately this power is only sufficient for about 2-5 km on land, depending on a number of circumstances, e.g. the topography, buildings and vegetation. The problems for real time use today are finding a suitable communication link and handling the difficulties arising from longer distances to the reference station. At this point, the first test with carrier phase measurements in real time (RTK-GPS) using a radio link for the data transmission was performed. The radio link used for broadcasting carrier phase measurements is cellular radiotelephone system. The capacity of the system has much higher data rate, 19200 bps, sufficient for carrier phase data transmission. During RTK surveying one receiver is being placed on a point with a known position (a reference station) and one or more mobile receivers (rovers) are moved to objects or along paths which are to be positioned. In order to get an impression of the accuracy and On-The-Fly initialization on long distances from the reference station, several performance tests were carried out with rover antenna attached on 5-rpm rotating table (Figure 4). Thus the position obtained is a circle of nearly constant radius if sufficient accuracy is achieved. Figure 5 shows one of the results with reference-rover separation of 15km. It is remarkable that, regardless of the separation up to 15 km, agreements on rover position within two-centimeter level were found.
Figure 4. Rotating table used for the RTK-GPS test.
Figure 5. Positions of the rover on the rotating table obtained at 1-second interval. The distance between the reference and the rover is 15 km. CONCLUDING REMARKSTo utilize GPS positioning, well-established control networks and associated procedures are required. Then, coordinates of surveying points with sufficient accuracy can be easily measured. In addition, the derivation of the consistent relationship between the existing national datum and WGS-84 must be one of the most important tasks. Several performance tests to confirm validity of GPS showed that GPS is effective not only in surveying geodetic control points but also in surveying cadastral control points. Even in urban area intermingled with buildings, over 95% of the observations on cadastral supplementary control points surveyed using a rapid static technique have good correspondences with the results obtained by EDMs and theodolites. In case of boundary relocation survey, a stop-and-go method in rural area for 7-10 seconds occupation showed 85% of observations have good results (Yang et al.,1997). However, it is found that the transformed results have different residuals, depending on data distribution, their qualities and sizes of test area. Therefore, more efforts must be made to provide a standard for datum transformation and associated procedures that will result in adequate and consistent accuracy over the country. Today, there is already a network of permanent reference stations for DGPS broadcasting. The repeatability of differential GPS positioning based on GPS network of Korea is better than RMS of 1m in horizontal and 2m in vertical in these tests. In the near future, the Korean network of permanent reference stations for GPS will support RTK surveying by using virtual reference station concept. REFERENCESChoi, K. S., J. H. Kim, and C. S. Yang, 1997, PNU95 Geoid, The Korean Journal of Geophysical Research, Vol.25, No.1. Rapp, R.H., Y.M. Wang, and N.K. Palvis, 1991, The Ohio State 1991 geopotential and sea surface topography harmonic coefficients models. Rep. No. 410, Dept. of Geodetic Sci. and Surveying, 94pp., The Ohio State Univ., Columbus, Ohio. Tsuchiya, A. and H. Tsuji, 1996, Introduction to GPS Surveying (In Japanese), 376pp. Japan Surveying Association, Tokyo, Japan. Yang. C.S., et al., 1997, Test of Cadastral Survey by Use of GPS (In Korean), Technical Report of Cadastral Technology Research Institute, 110p, Korea Cadastral Survey Corporation, Seoul, Korea. Yang, C. S., K. J. Cho, and J. H. Kim, 1998, Datum Transformation between Korean Geodetic System and WGS-84 (In Korean), J. of the Korean Society of Cadastre, Vol.12, No.1. CONTACTChulsoo Yang Sangsoo Kim 17 April 2001 This page is maintained by the FIG Office. Last revised on 15-03-16. |