Article of the Month - Marts 2015 |
Seafloor Swathe Survey for Search and Rescue Mission of Air Asia QZ8501POERBANDONO, Indonesia 1) On the 28 December, 2014, a commercial airplane, Air Asia QZ8501 flying from Surabaya (Indonesia) to Singapore, was reported missing and believed to crash into the sea. This paper focuses upon the search for the flight. Three survey zones were covered: Area-1 (the position of last contact from the airplane), Area-2 (where debris and bodies from the crashed airplane were recovered), and Area-3 (the last RADAR sighting). Area-2 is about 15 km SE of Area-1 and Area-3 is about 89 km NW of Area-2. The survey is executed as seabed search by using Side Scan Sonar imagery and Multi Beam Echo Sounder point cloud data. Key words: Scouting procedure, SSS contact, MBES height, ROV inspection
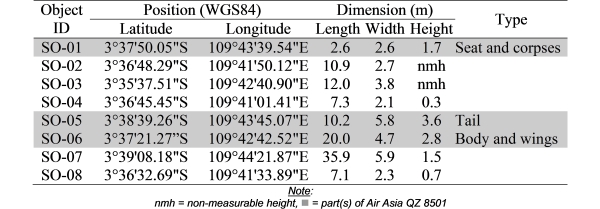
SUMMARYSearch survey operation is launched by the Indonesian Association of Marine Survey Contractors (AKSLI) between the December 31st, 2014 and the January 16th, 2015. The operation deploys MGS GEOSURVEY vessel under the command of the National Agency for Search and Rescue (BASARNAS). As much as 16 technical crews were onboard. They serve as survey and Remotely Operated Vehicle (ROV) teams led by a party chief. The operation aims at searching the missing commercial plane, Air Asia QZ8501, formally announced on the December 28th, 2014 over NW of Java Sea, Indonesia. Three survey zones were covered: Area-1 (the position of last contact from the airplane), Area-2 (where debris and bodies from the crashed airplane were recovered), and Area-3 (the last RADAR sighting). Area-2 is about 15 km SE of Area-1 and Area-3 is about 89 km NW of Area-2. The survey is executed as seabed search by using Side Scan Sonar imagery and Multi Beam Echo Sounder point cloud data. The search relies on detection of sonar contacts, continued by interpretation of manmade or non-natural features identified as suspected objects. Suspected objects are defined on the basis of anomalous dimension, particularly height, with respect to the ambient. Subsequently, visual recognition employing ROV and manual inspection (i.e. divers) supported by underwater positioning system are done to verify whether or not the object is part of the missing airplane. Out of three survey areas, 13 sonar contacts were detected and subsequently eight suspected objects were identified and verified. This 17 days launch mission was able to discover major parts of the crashed airplane in Area-3. Three sites of the crashed airplane were located: the tail, seats and corpses, and body and wings. They are situated on the seabed elongated approximately NW-SE across roughly 3100 m distance, with the following detail of horizontal positions:
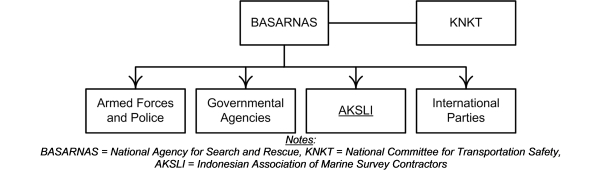
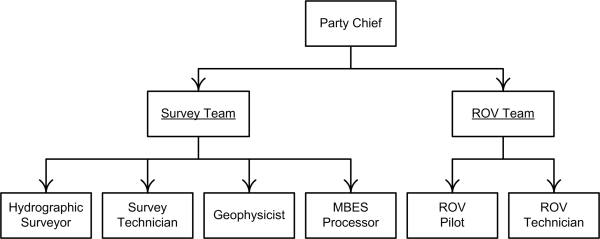
Seafloor Swathe Survey for Search and Rescue Mission of Air Asia QZ8501 1. INTRODUCTIONOn the 28th of December, 2014, a commercial airplane, Air Asia QZ8501 flying from Surabaya (Indonesia) to Singapore, was reported missing and believed to crash into the sea. The latest known position is situated in the very NW of Java Sea, Indonesia. In supporting national Search and Rescue (SAR) mission, the Indonesian Association of Marine Survey Contractors (AKSLI) launched a search survey operation with MGS GEOSURVEY vessel. AKSLI team is mobilized on December 31st, 2014 from Tanjung Priok Port, Jakarta and the entire operation is accomplished on the 16th of January, 2015. The search survey operation is carried out under the command of the Indonesian National Agency for Search and Rescue (BASARNAS). In Figure 1, parties involved in the mission are shown.
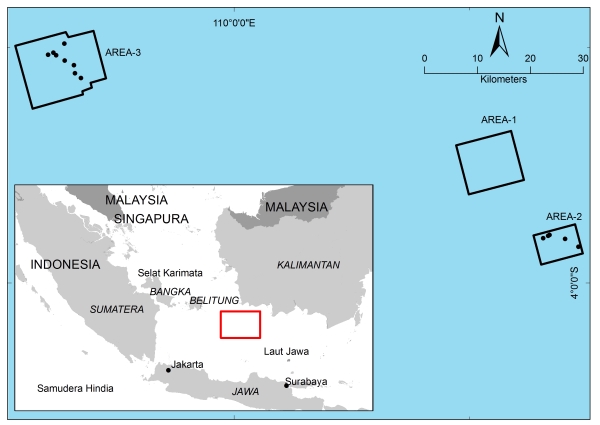
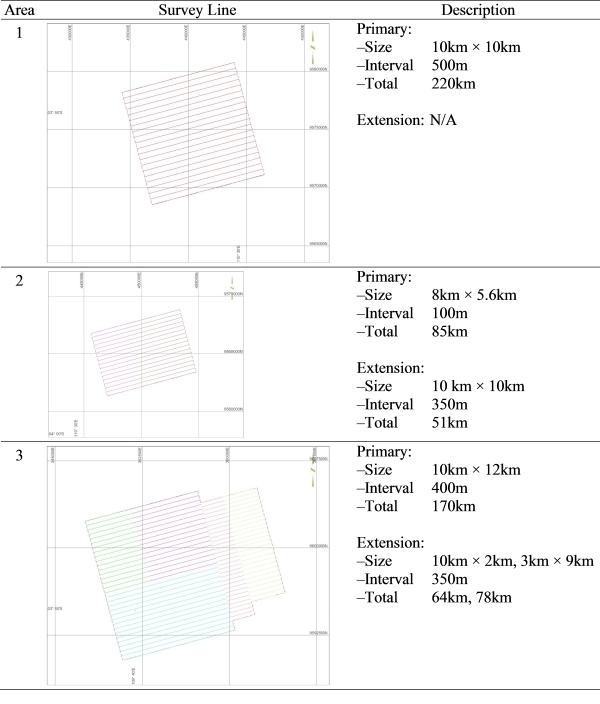
This paper is prepared in order to document essential technical parts of the search survey operation. The documentation will include primarily the sequence of scouting procedure. The organization of personnel and the deployment of equipments are also presented. It is expected that the readership is able to assess how recent best practice of hydrographic survey could be contributed to specific mission, i.e. underwater SAR. The primary source of information presented in this paper is originated from AKSLI survey report and daily field log (AKSLI, 2015). To the extent of completeness of survey report and daily field log, this paper is written in its best accuracy, in terms of procedure, personnel, and equipments. 2. SURVEY OPERATION2.1 Survey PlanThe purpose of the launching of search survey operation is to conduct seafloor mapping in order to find the main body or parts of the missing Air Asia QZ8501. The mapping is hence intended to discriminate manmade objects (possibly leading to an interpretation of parts of the missing plane) from natural seabed including inherent features surrounding them. The search survey operation was initially done in Area-1. Area-1 is known as the position of the latest contact from the airplane. The next survey zone (Area-2) is where floating debris and bodies were recovered. Later on, another zone (Area-3) situated several tens of kilometres NW away from the first two zones was also surveyed. Area-3 is the recorded latest RADAR sighting and lost contact. These locations are situated in the N of Java Sea, SE of Belitung Island, Indonesia. Figure 2 shows the three survey zones and their approximate distance. Area-2 is about 15 km away SE of Area-1, while Area 3 is roughly 89 km away NW of Area-2. The central coordinates of all survey areas are supplied by BASARNAS command centre. AKSLI team decides the search strategy by planning the survey extent (boundaries), survey line, and line interval. Area-1 is 10 km by 10 km in size and consists of 22 mainlines with 500 m spacing. Area-2 is 5 km by 5.6 km in size and consists of 17 main lines with 350 m spacing. The survey corridor was extended 3 km SW. Area-3, is 10 km by 12 km in size and consists of 18 main lines with 400 m of spacing. Here, the survey corridor was extended 4 km SW and 6 km SSE with equal spacing, and widen 2 km and 3 km NW with 350 m spacing. In Table 1, description of survey line is shown.
Table 1 Volume (i.e. line, length) of each of survey areas on UTM49S 2.2 ProcedureIn each of survey zone, the tracking of survey line is started from the line intercepting the central coordinates, hereinafter termed as the primary survey line. Line orientation is drawn out parallel to approximate current direction. The progress of the tracking of survey line is made by the sailing of survey vessel away line-by-line from the primary survey line. Over the course of survey lines, the basic procedure for search survey follows.
Throughout the entire cycle of search survey procedure, the processing of data, the subsequent interpretation, including charting and reporting are carried out simultaneously along with the onboard data acquisition. No water level correction due to tide is applied. 2.3 Equipments and PersonnelThe survey work entails the deployment of dual head MBES, dual frequency SSS, and the operation of ROV, including horizontal positioning system using differential Global Navigation Satellite System (GNSS). SSS is meant to detect bottom reflectivity, while MBES is intended to approximate the apparent height. Among others, the primary equipments and their peripherals are: GNSS heading, gyro compass, ultra short base line (USBL) system, navigation system software, motion reference unit, sound velocity sensor, and Conductivity-Temperature-Depth (CTD) profiler. Field calibrations and functional tests were undertaken. They are applied to the primary and secondary positioning systems, gyro compass, echo sounder transducer draft, as well as vessel and sensor offset. Another tests were also done for online navigation computers, fix annotation and interfacing from the navigation computer to the analogue recording systems, and motion sensors. MBES, SSS, and CTD systems experienced specific wet tests. On-site calibration and functional tests were done for vertical acoustic velocity profile, rub test of SSS pre-dive check, and for ROV. Figure 3 shows the structure of organization of the technical team on-board. A party chief leads two teams (i.e. survey, ROV) and manages as much as 16 technical personnel. Survey team is composed by personnel assigned as hydrographic surveyor, survey technician, geophysicist, and MBES processor. The ROV team consists of ROV pilot and ROV technician.
3. RESULTSSSS data is presented as mosaics of grey shaded imagery. Its brightness corresponds to the strength of the returning signal and is used to infer bottom type (sediment texture and roughness) and to proxy substrate characteristic. From this, it is seen that the seabed is characterized by low to high sonar reflectivity. High sonar reflectivity is interpreted as coarser and mobile sediments, while low sonar reflectivity is indicative of softer sediment. Indication of mobile sediments associated with presence of sand ridges was found in Area-3. MBES data is presented as point cloud, from which the geometrical appearance of seabed can be identified. It is known from here on that the water depths within the survey areas vary between approximately 25 m and 38 m. The seabed relief in the surveyed zones is considerably undulated indicating bathymetrical irregularity, and slightly dipping to NE at an approximate height of less than 0.5 m. Such an irregularity is mostly associated with micro-sized ridges and depression of seabed. Thirteen sonar contacts were detected from SSS imagery. They show higher reflectivity with respect to the ambient. The majority of these contacts indicate substantially apparent heights as approximated from MBES point cloud data. Therefore, these contacts are believed to represent man-made object. Details are elaborated as follow. 3.1 Area-1No significant sonar contact is recorded here. 3.2 Area-2As detected by SSS, five sonar contacts were recorded here (Figure 4) and considered as suspected objects due to their size. Details of suspected objects recorded in Area-2 are listed in Table 2. From MBES point cloud data, however, only SO-04 is understood to indicate significant dimension, particularly its apparent height. No significant height is detected from the rest of suspected objects.
Figure 4 SSS mosaic with markers of Suspected Object (SO) in Area-2
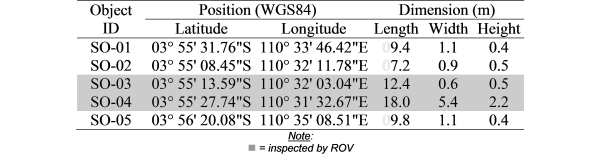
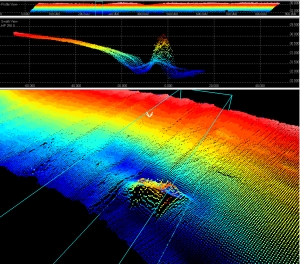
Table 2 List of position and dimension of suspected objects in Area-2 ROV deployment assisted by USBL positioning system and diving operations by the Indonesian Navy diving team were conducted to identify SO-03 and SO-04. These visual and manual inspections lead to a conclusion that these two objects are not associated with any parts of the airplane. The deployment of ROV and diver to validate SO-03 (although it does not indicate significant apparent height) is carried out in order to provide control evidence. Sonar contacts in SO-04 are shown in Figure 5. Figure 6 shows ROV footage of SO-04 indicating an object thought as wreck covered by coral colony. Relatively deep water and strong current do not allow good visibility.
Figure 5 Sonar records of suspected object in SO-04
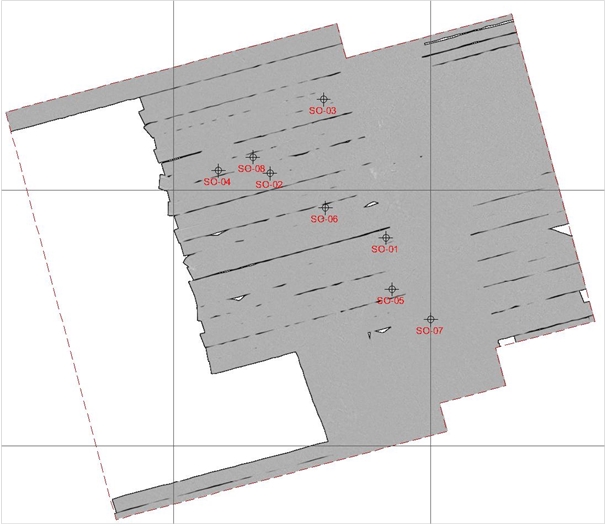
3.3 Area-3Eight sonar contacts were recorded by SSS and their apparent heights were also measured by MBES, hence interpreted as suspected objects. ROV deployment assisted by USBL positioning system and diving operations were conducted to verify six of them. Figure 7 shows suspected objects in Area-3 as appear on SSS image mosaic. Table 3 shows list of the corresponding suspected objects. Verification through visual detection using ROV and manual inspection by divers confirmed that SO-01, SO-05, and SO-06 are parts of the missing airplane. In particular, SO-05 is identified as the tail. SO-01 is confirmed as seats and corpses. It is validated that SO-06 are the body and wings.
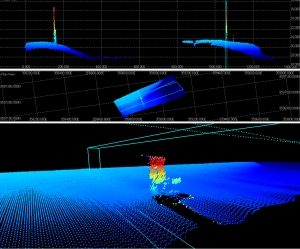
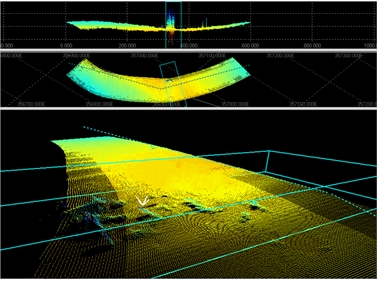
Table 3 List of suspected objects in Area-3 Figure 8 shows SSS image and MBES point cloud data of SO-05. The corresponding ROV footage and underwater photograph taken by diver are shown in Figure 9. It is validated that the object is the tail of Air Asia QZ8501.
Figure 8 Sonar records of suspected object in SO-05
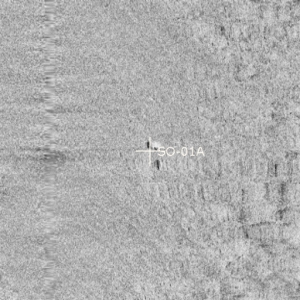
Figure 9 Photos of suspected object in SO-05 identified as tail Figure 10 shows SSS image and MBES point cloud data of SO-01. It is identified that these objects are seat and corpses. AKSLI vessel was ordered to recover the object found in SO-01. Figure 11 shows the underwater photograph of object found in SO-01 and the evacuation of casualty on board of MGS GEOSURVEY vessel.
Figure 10 Sonar records of suspected object in SO-01
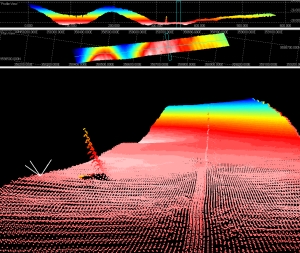
Figure 11 Recovery of seat and corpses found in SO-01 Figure 12 shows SSS image and MBES point cloud data of SO-06. Validation of SO-06 is executed by ROV from MV Swift Rescue. It is confirmed that these are main body and wings of the plane. Figure 13 shows ROV footage of object identified as SO-06.
Figure 12 Sonar records of suspected object in SO-06
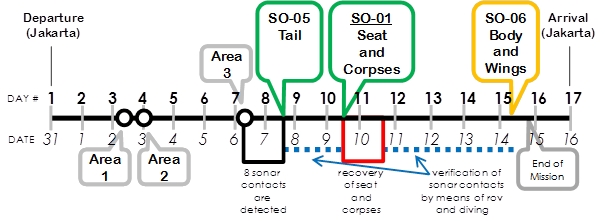
Figure 13 ROV footages of suspected object in SO-06 (Photo: MV Swift Rescue) 4. CLOSING REMARKSum up of important milestone of AKSLI mission reported in this paper is visualized in Figure 14. Once the best approximate location is known, regular hydrographic survey can accurately locate the searched objects. SSS imagery provides isolation of underwater entities considered as sonar contacts. Data from MBES point cloud help to approximate significant apparent height of such sonar contacts. This leads to identification of anomalous underwater object due to its contrast with respect to the ambient. These sequences provide effective assistance to an underwater SAR mission by narrowing the spatial extent of search area. Experience from this search mission indicates that the operation was able to locate the first object (i.e. SO-05) within 24 hours since the arrival in the survey area and within the next 48 hours the other object was located, i.e. SO-01.
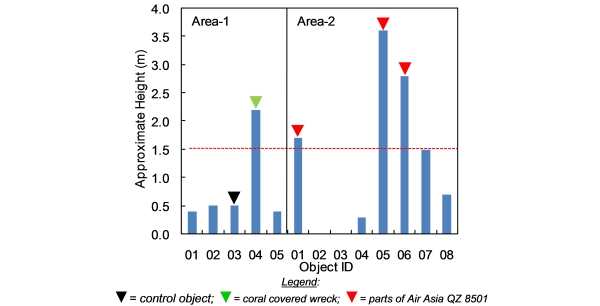
In Figure 15, summary of detected heights of suspected objects from Area-2 and Area-3 is visualized. Looking at the recorded heights of suspected objects, it seems that anomalous heights of greater than 1.5 m may lead to an approximation of non-natural objects. Red triangles in Figure 15 indicate heights of objects measured by MBES that lead to presence of parts of the missing airplane, as validated by direct inspection.
Figure 15 Summary of height of suspected object in Area-2 (01 to 05) and Area-3 (01 to 08) ACKNOWLEDGEMENTThis paper is based on AKSLI Corporate Social Responsibility Survey Report (AKSLI, 2015). Credit goes to AKSLI, on-board technical crews, and relevant aforementioned parties. AKSLI mission is also supported by Geodesy Alumni Association (IAGD), Institut Teknologi Bandung (ITB). Endorsement to personnel involved in the mission is given by the Indonesian Surveyor Association (ISI). The preparation of this paper is encouraged by AKSLI chairman, Mr. Sobri Syawie. The author is profoundly saddened by the crash of Air Asia QZ8501. REFERENCEAKSLI, 2015. Search and Rescue of Air Asia QZ8501 by Using Side Scan Sonar, Multi Beam Echo Sounder and Remotely Operated Vehicle, Java Sea and Karimata Strait, Indonesia. Corporate Social Responsibility Survey and Seafloor Mapping Community for Nation. Survey Report. Indonesian Association of Marine Survey Contractors (Asosiasi Kontraktor Survei Laut Indonesia - AKSLI). Jakarta, Indonesia. BIOGRAPHICAL NOTESDr.rer.nat. Poerbandono is Associate Professor in Hydrography and course coordinator of FIG/IHO/ICA Category A Hydrographic Surveyor Profession Education Program at Geodesy and Geomatics Engineering Study Program, Faculty of Earth Sciences and Technology, Institut Teknologi Bandung (ITB), Indonesia. CONTACTSDr.rer.nat. Poerbandono |









 (b)
MBES point cloud
(b)
MBES point cloud